



Nothing Found
Sorry, what you are looking for isn't here.
Industry News
We are pleased to welcome Kimberly-Clark Corporation as CiBER's first Corporate Member (Platinum-level).

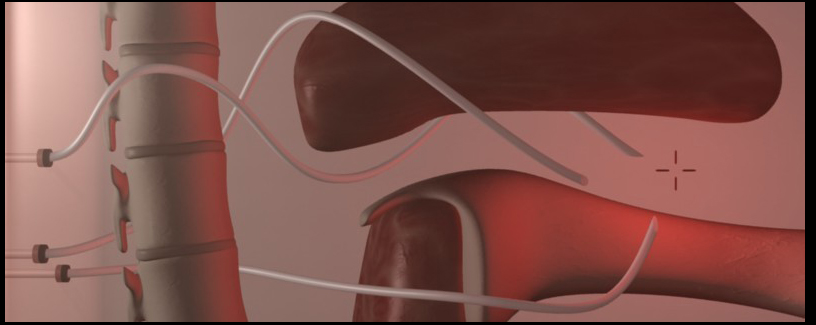
The Goldberg Lab is designing, prototyping, and evaluating systems that will steer flexible needles from outside the body through deformable tissues to reach specified 3D anatomical targets. Our approach integrates real-time imaging, adaptive modeling and planning, and image-guided intraoperative needle control.
Sorry, what you are looking for isn't here.
We are pleased to welcome Kimberly-Clark Corporation as CiBER's first Corporate Member (Platinum-level).
