



JRSI Cockroach Transitions
Cockroach-inspired robots crashes into walls on purpose. Full Story on AAAS Science News.
PUBLICITY INFORMATION FOR: Kaushik Jayaram, Jean-Michel Mongeau, Anand Mohapatra, Paul Birkmeyer, Ronald S. Fearing and Robert J. Full (2018) Transition by head-on collision: mechanically mediated manoeuvres in cockroaches and small robots. Journal of the Royal Society Interface. http://dx.doi.org/10.1098/rsif.2017.0664
THIS IS A PRIVATE WEBSITE. All information is embargoed with immediate effect until February 14, 2018 at 0:00 AM GMT. Any access to this information is logged.
SHOULD YOU HAVE REACHED THIS WEBSITE BY ACCIDENT PLEASE CONTACT pauline@berkeley.edu.
Please note: The content of any press release and related material is embargoed with immediate effect until February 14, 2018 at 0:00 AM GMT. For more information, see embargo policy of the Royal Society https://royalsociety.org/journals/ethics-policies/media-embargo/. The paper will be published online and will be citable via http://rsif.royalsocietypublishing.org/content/15/139/20170664.
High Resolution Cover & Figures
Contact Information for Comments
Authors
Kaushik Jayaram. Department of Integrative Biology, University of California at Berkeley, CA 94720.
School of Engineering and Applied Sciences, Harvard University, Cambridge, MA 02138.
Phone + 1 (510) 499-5164 (mobile). kjayaram@seas.harvard.edu.
Jean-Michel Mongeau. Biophysics Graduate Group, University of California at Berkeley, CA 94720.
Department of Mechanical and Nuclear Engineering, The Pennsylvania State University, University Park, PA 16802, USA.
Anand Mohapatra. Department of Integrative Biology, University of California at Berkeley, CA 94720.
Paul Birkmeyer. Department of Electrical Engineering and Computer Science, University of California, Berkeley, CA 94720.
Ronald S. Fearing. Department of Electrical Engineering and Computer Science, University of California, Berkeley, CA 94720. Phone +1 (510) 642-9193 (office). ronf@eecs.berkeley.edu
Robert Full. Department of Integrative Biology, University of California at Berkeley, CA 94720-3140. Phone +1 (510) 642-9896 (office) or +1 (510) 332-7484 (mobile). rjfull@berkeley.edu
Center for Interdisciplinary Bio-inspiration in Education and Research Visit CiBER Center for Learning from Nature
UC Berkeley’s PolyPEDAL Lab Visit
Kaushik Jayaram’s Personal Webpage Visit
ALL GRAPHICAL MATERIAL (movies, images) IS COPYRIGHTED AND MAY BE USED FOR NEWS PURPOSES ONLY WITH APPROPRIATE CREDIT. ALL MATERIAL FROM THE JRSI ARTICLE SHOULD BE CREDITED AS COPYRIGHT JOURNAL OF THE ROYAL SOCIETY INTERFACE 2018. ALL OTHER MATERIAL SHOULD BE CREDITED AS “Courtesy of PolyPEDAL Lab” WITH PHOTO CREDIT IF INCLUDED.”
Figures from Paper
- Figure 1
COPYRIGHT JRSI 2018. To view Figure 1 in full-size, please click on the image above.

- Figure 2
COPYRIGHT JRSI 2018. To view Figure 2 in full-size, please click on the image above.

- Figure 3
COPYRIGHT JRSI 2018. To view Figure 3 in full-size, please click on the image above.
- Figure 4
COPYRIGHT JRSI 2018. To view Figure 4 in full-size, please click on the image above.
- Supplementary Figure 1
COPYRIGHT JRSI 2018. To view Supplementary Figure 1 in full-size, please click on the image above.
- Supplementary Figure 2
COPYRIGHT JRSI 2018. To view Supplementary Figure 2 in full-size, please click on the image above.
Movies from Paper with Compilation of All
Supplementary Movie 1 Full_Video_s1
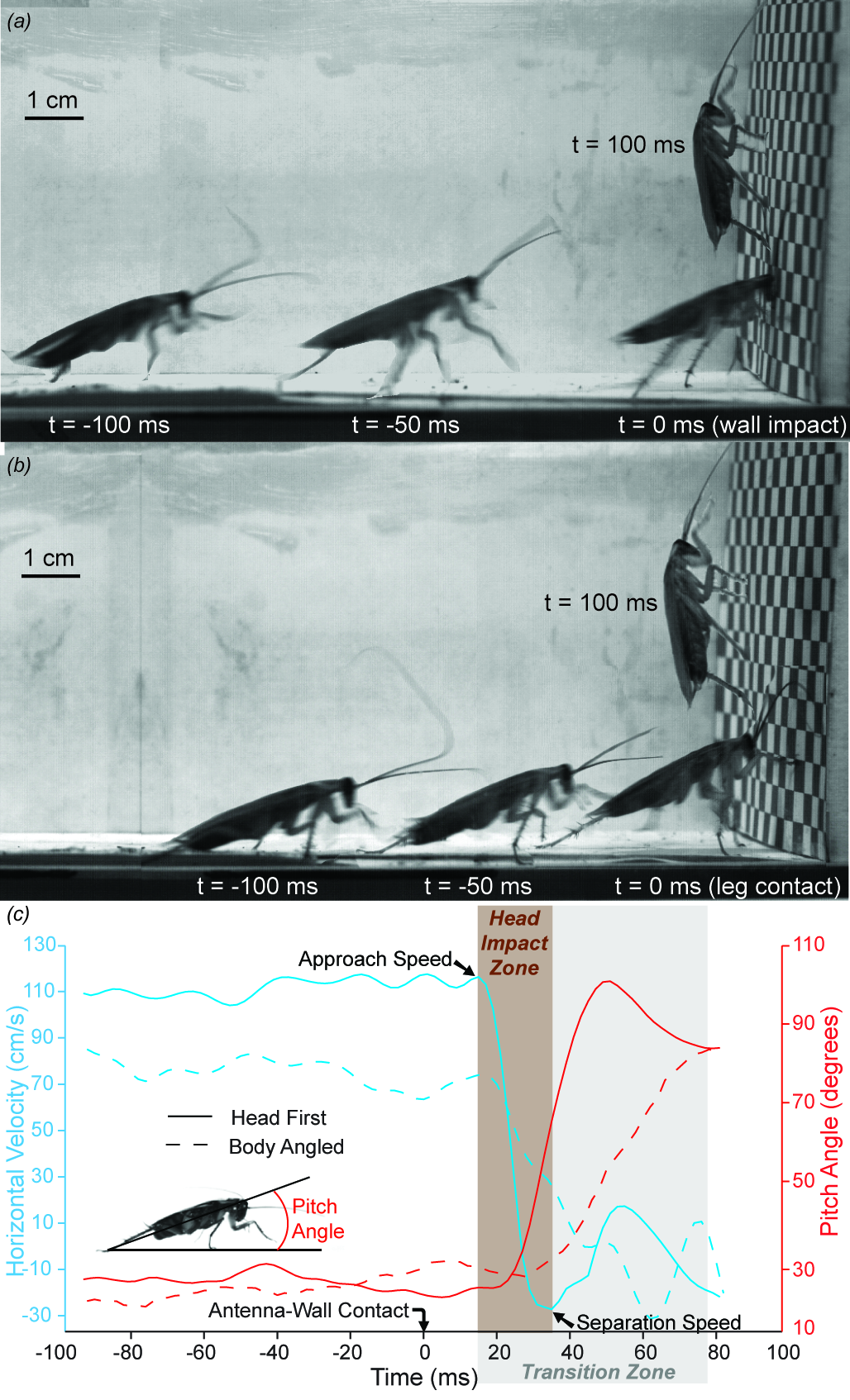
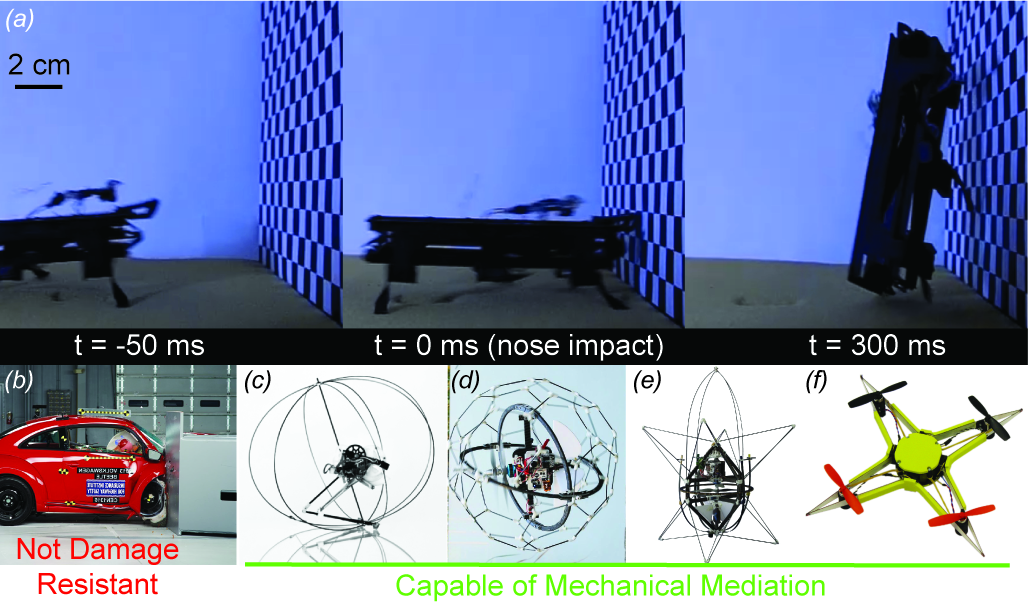
The American cockroach, P. americana, running at high-speed collides head-on with a wall, but transitions up it rapidly. The first sequences of video are real-time. The second sequence is slowed 50X.
Supplementary Movie 2 Full_Video_s2
The American cockroach, P. americana, running at high-speed uses a body-angled strategy to transition up a wall rapidly, dissipating energy with its legs. The first sequences of video are real-time. The second sequence is slowed 50X.
Supplementary Movie 3 Full_Video_s3
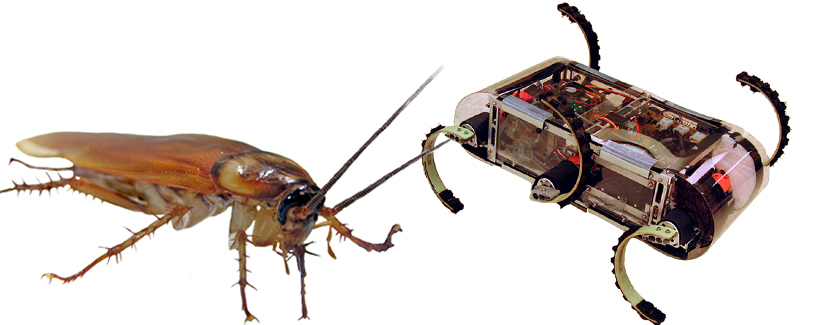
Robot (DASH; Dynamic Autonomous Sprawled Hexapod Robot) running at high-speed collides head-on with a wall, dissipates energy and bounces back. The first sequences of video are real-time. The second sequence is slowed 50X.
Compilation Video of All Movies from Paper Full_Video _compilation
Additional Images
Please click on an image to view the full-resolution version.

The American Cockroach, Periplaneta americana, about 3 centimeter long, weighs under 1 gram. Photo Credit Jean-Michel Mongeau. Courtesy of PolyPEDAL Lab, UC Berkeley.

An American Cockroach, Periplaneta americana, upside down on a ledge. Photo Credit Jean-Michel Mongeau. Courtesy of PolyPEDAL Lab, UC Berkeley.

An American Cockroach, Periplaneta americana. Photo Credit Jean-Michel Mongeau. Courtesy of PolyPEDAL Lab, UC Berkeley.
Contact Information for Comments on Article
Professor Daniel I. Goldman (physics of animal locomotion)
School of Physics
Georgia Institute of Technology
Phone: 404-894-0993
email: daniel.goldman@physics.gatech.edu
Professor David Hu (physics of animal locomotion and bio-inspired robots)
Department of Mechanical Engineering and Biology
Georgia Institute of Technology
Phone: 404-894-0573
email: hu@me.gatech.edu
Professor Dario Floreano (bio-inspired robots)
School of Engineering STI,
Ecole Polytechnique Federale du Lausanne, Switzerland
Phone: +41 21 69 35230
email: dario.floreano@epfl.ch
Professor Robert Wood (bio-inspired robots)
School of Engineering & Applied Sciences
Harvard University
Phone: 617-496-1341
email: rjwood@seas.harvard.edu
Professor Mark Cutkosky (bio-inspired robots)
Department of Mechanical Engineering
Stanford University
Phone: 650-721-9433 / 650-723-1644
email: cutkosky@stanford.edu
Professor Andrew Biewener (animal biomechanics)
Department of Organismic & Evolutionary Biology
Concord Field Station, Harvard University
Phone: 781-275-1725, ext 105
e-mail: abiewener@oeb.harvard.edu
Professor Stacey Combes (insect biomechanics)
College of Biological Sciences,
University of California Davis
Phone: 530-752-8144
e-mail: sacombes@ucdavis.edu
Senior Lecturer Walter Federle (insect biomechanics)
Department of Zoology
University of Cambridge
Phone: +44 (0)1223 763435
email: wf222@cam.ac.uk
Industry News
We are pleased to welcome Kimberly-Clark Corporation as CiBER's first Corporate Member (Platinum-level).

